14.3 動態規劃解題思路¶
上兩節介紹了動態規劃問題的主要特徵,接下來我們一起探究兩個更加實用的問題。
- 如何判斷一個問題是不是動態規劃問題?
- 求解動態規劃問題該從何處入手,完整步驟是什麼?
14.3.1 問題判斷¶
總的來說,如果一個問題包含重疊子問題、最優子結構,並滿足無後效性,那麼它通常適合用動態規劃求解。然而,我們很難從問題描述中直接提取出這些特性。因此我們通常會放寬條件,先觀察問題是否適合使用回溯(窮舉)解決。
適合用回溯解決的問題通常滿足“決策樹模型”,這種問題可以使用樹形結構來描述,其中每一個節點代表一個決策,每一條路徑代表一個決策序列。
換句話說,如果問題包含明確的決策概念,並且解是透過一系列決策產生的,那麼它就滿足決策樹模型,通常可以使用回溯來解決。
在此基礎上,動態規劃問題還有一些判斷的“加分項”。
- 問題包含最大(小)或最多(少)等最最佳化描述。
- 問題的狀態能夠使用一個串列、多維矩陣或樹來表示,並且一個狀態與其周圍的狀態存在遞推關係。
相應地,也存在一些“減分項”。
- 問題的目標是找出所有可能的解決方案,而不是找出最優解。
- 問題描述中有明顯的排列組合的特徵,需要返回具體的多個方案。
如果一個問題滿足決策樹模型,並具有較為明顯的“加分項”,我們就可以假設它是一個動態規劃問題,並在求解過程中驗證它。
14.3.2 問題求解步驟¶
動態規劃的解題流程會因問題的性質和難度而有所不同,但通常遵循以下步驟:描述決策,定義狀態,建立 \(dp\) 表,推導狀態轉移方程,確定邊界條件等。
為了更形象地展示解題步驟,我們使用一個經典問題“最小路徑和”來舉例。
Question
給定一個 \(n \times m\) 的二維網格 grid ,網格中的每個單元格包含一個非負整數,表示該單元格的代價。機器人以左上角單元格為起始點,每次只能向下或者向右移動一步,直至到達右下角單元格。請返回從左上角到右下角的最小路徑和。
圖 14-10 展示了一個例子,給定網格的最小路徑和為 \(13\) 。
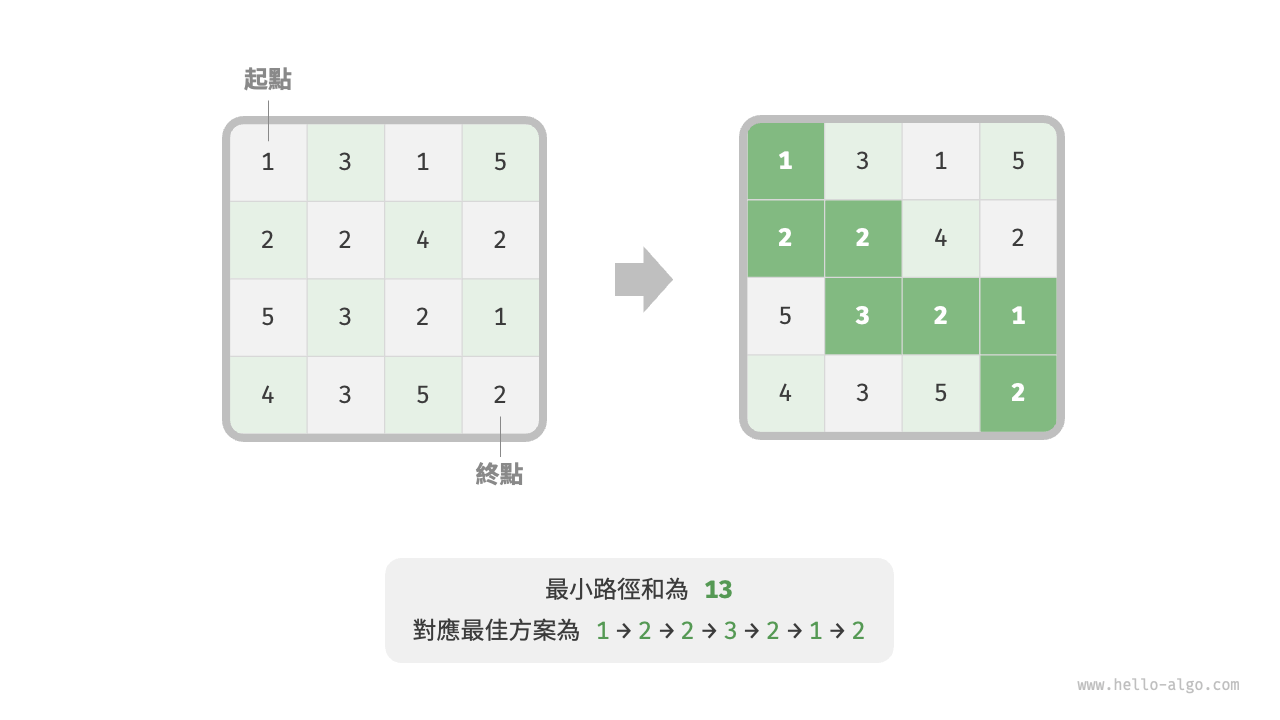
圖 14-10 最小路徑和示例資料
第一步:思考每輪的決策,定義狀態,從而得到 \(dp\) 表
本題的每一輪的決策就是從當前格子向下或向右走一步。設當前格子的行列索引為 \([i, j]\) ,則向下或向右走一步後,索引變為 \([i+1, j]\) 或 \([i, j+1]\) 。因此,狀態應包含行索引和列索引兩個變數,記為 \([i, j]\) 。
狀態 \([i, j]\) 對應的子問題為:從起始點 \([0, 0]\) 走到 \([i, j]\) 的最小路徑和,解記為 \(dp[i, j]\) 。
至此,我們就得到了圖 14-11 所示的二維 \(dp\) 矩陣,其尺寸與輸入網格 \(grid\) 相同。
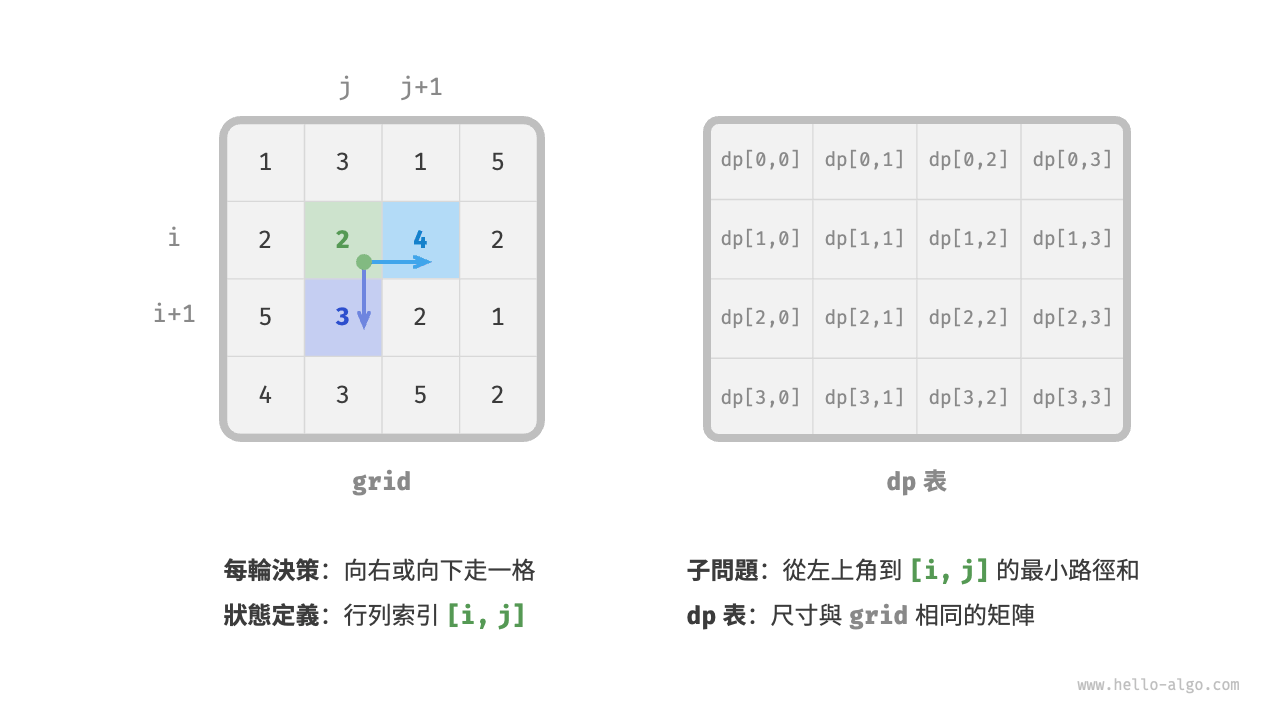
圖 14-11 狀態定義與 dp 表
Note
動態規劃和回溯過程可以描述為一個決策序列,而狀態由所有決策變數構成。它應當包含描述解題進度的所有變數,其包含了足夠的資訊,能夠用來推導出下一個狀態。
每個狀態都對應一個子問題,我們會定義一個 \(dp\) 表來儲存所有子問題的解,狀態的每個獨立變數都是 \(dp\) 表的一個維度。從本質上看,\(dp\) 表是狀態和子問題的解之間的對映。
第二步:找出最優子結構,進而推導出狀態轉移方程
對於狀態 \([i, j]\) ,它只能從上邊格子 \([i-1, j]\) 和左邊格子 \([i, j-1]\) 轉移而來。因此最優子結構為:到達 \([i, j]\) 的最小路徑和由 \([i, j-1]\) 的最小路徑和與 \([i-1, j]\) 的最小路徑和中較小的那一個決定。
根據以上分析,可推出圖 14-12 所示的狀態轉移方程:
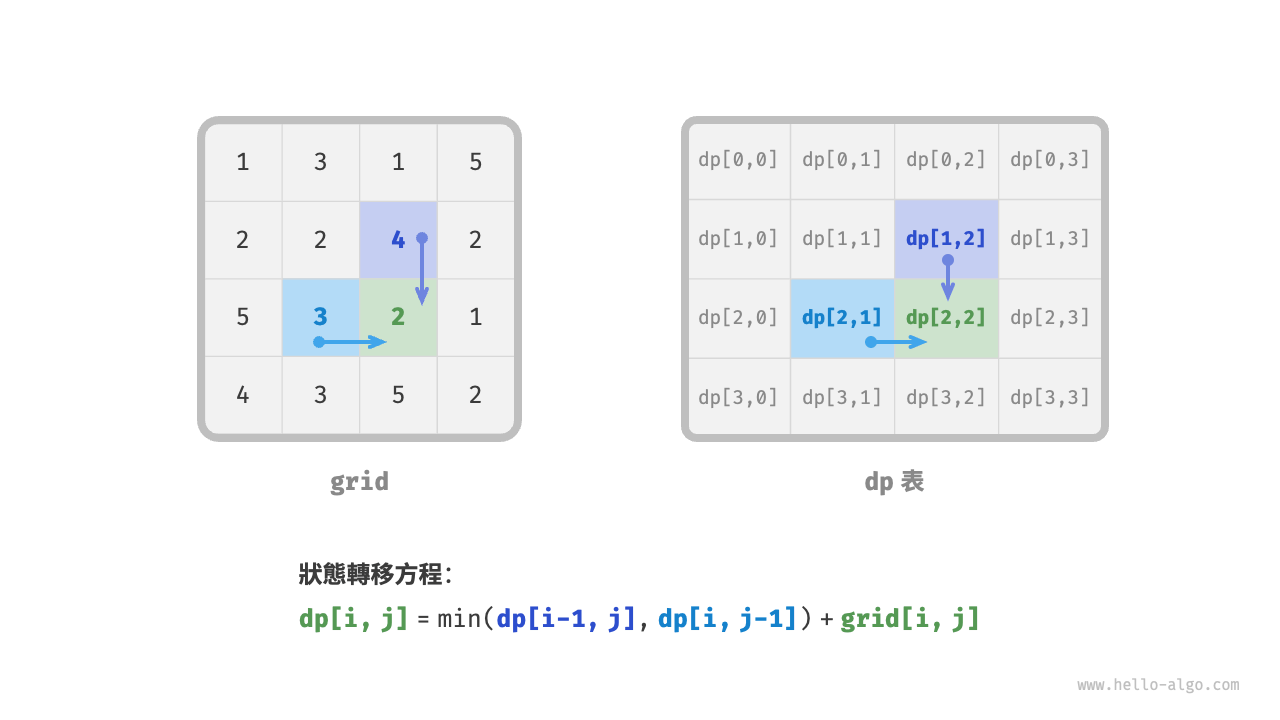
圖 14-12 最優子結構與狀態轉移方程
Note
根據定義好的 \(dp\) 表,思考原問題和子問題的關係,找出透過子問題的最優解來構造原問題的最優解的方法,即最優子結構。
一旦我們找到了最優子結構,就可以使用它來構建出狀態轉移方程。
第三步:確定邊界條件和狀態轉移順序
在本題中,處在首行的狀態只能從其左邊的狀態得來,處在首列的狀態只能從其上邊的狀態得來,因此首行 \(i = 0\) 和首列 \(j = 0\) 是邊界條件。
如圖 14-13 所示,由於每個格子是由其左方格子和上方格子轉移而來,因此我們使用迴圈來走訪矩陣,外迴圈走訪各行,內迴圈走訪各列。
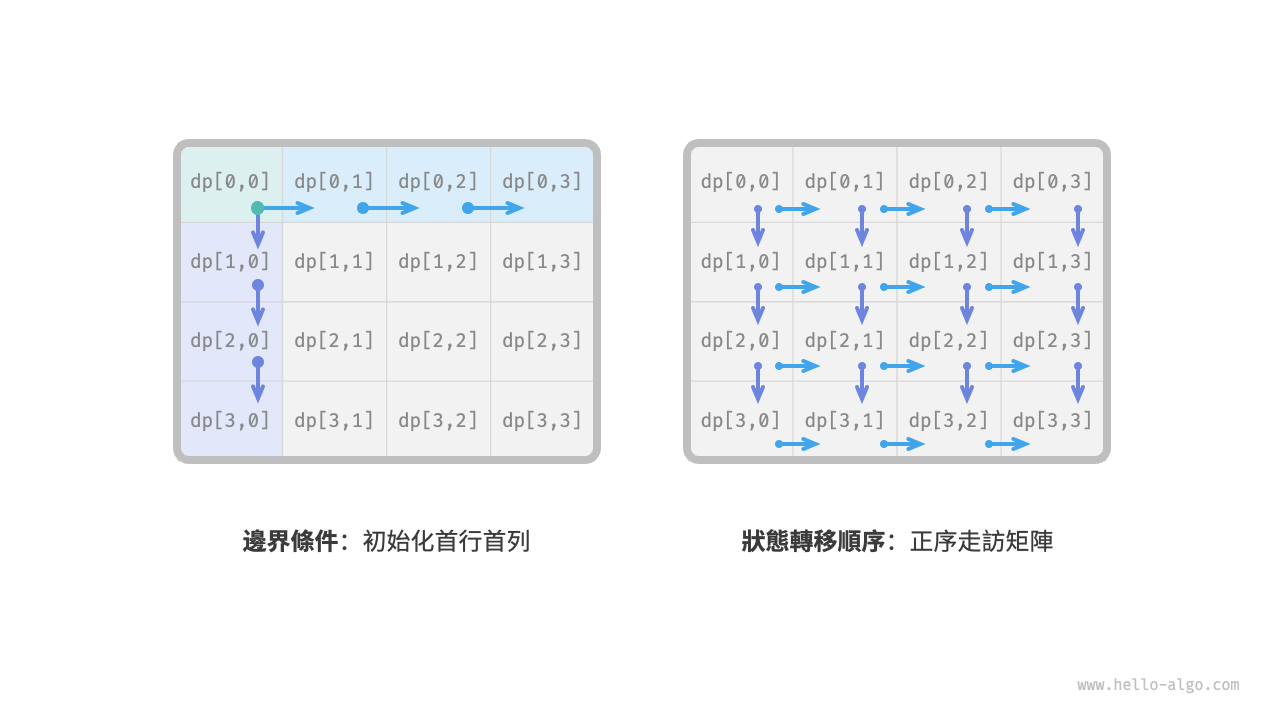
圖 14-13 邊界條件與狀態轉移順序
Note
邊界條件在動態規劃中用於初始化 \(dp\) 表,在搜尋中用於剪枝。
狀態轉移順序的核心是要保證在計算當前問題的解時,所有它依賴的更小子問題的解都已經被正確地計算出來。
根據以上分析,我們已經可以直接寫出動態規劃程式碼。然而子問題分解是一種從頂至底的思想,因此按照“暴力搜尋 \(\rightarrow\) 記憶化搜尋 \(\rightarrow\) 動態規劃”的順序實現更加符合思維習慣。
1. 方法一:暴力搜尋¶
從狀態 \([i, j]\) 開始搜尋,不斷分解為更小的狀態 \([i-1, j]\) 和 \([i, j-1]\) ,遞迴函式包括以下要素。
- 遞迴參數:狀態 \([i, j]\) 。
- 返回值:從 \([0, 0]\) 到 \([i, j]\) 的最小路徑和 \(dp[i, j]\) 。
- 終止條件:當 \(i = 0\) 且 \(j = 0\) 時,返回代價 \(grid[0, 0]\) 。
- 剪枝:當 \(i < 0\) 時或 \(j < 0\) 時索引越界,此時返回代價 \(+\infty\) ,代表不可行。
實現程式碼如下:
def min_path_sum_dfs(grid: list[list[int]], i: int, j: int) -> int:
"""最小路徑和:暴力搜尋"""
# 若為左上角單元格,則終止搜尋
if i == 0 and j == 0:
return grid[0][0]
# 若行列索引越界,則返回 +∞ 代價
if i < 0 or j < 0:
return inf
# 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
up = min_path_sum_dfs(grid, i - 1, j)
left = min_path_sum_dfs(grid, i, j - 1)
# 返回從左上角到 (i, j) 的最小路徑代價
return min(left, up) + grid[i][j]
/* 最小路徑和:暴力搜尋 */
int minPathSumDFS(vector<vector<int>> &grid, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return INT_MAX;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
int up = minPathSumDFS(grid, i - 1, j);
int left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return min(left, up) != INT_MAX ? min(left, up) + grid[i][j] : INT_MAX;
}
/* 最小路徑和:暴力搜尋 */
int minPathSumDFS(int[][] grid, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Integer.MAX_VALUE;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
int up = minPathSumDFS(grid, i - 1, j);
int left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return Math.min(left, up) + grid[i][j];
}
/* 最小路徑和:暴力搜尋 */
int MinPathSumDFS(int[][] grid, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return int.MaxValue;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
int up = MinPathSumDFS(grid, i - 1, j);
int left = MinPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return Math.Min(left, up) + grid[i][j];
}
/* 最小路徑和:暴力搜尋 */
func minPathSumDFS(grid [][]int, i, j int) int {
// 若為左上角單元格,則終止搜尋
if i == 0 && j == 0 {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return math.MaxInt
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
up := minPathSumDFS(grid, i-1, j)
left := minPathSumDFS(grid, i, j-1)
// 返回從左上角到 (i, j) 的最小路徑代價
return int(math.Min(float64(left), float64(up))) + grid[i][j]
}
/* 最小路徑和:暴力搜尋 */
func minPathSumDFS(grid: [[Int]], i: Int, j: Int) -> Int {
// 若為左上角單元格,則終止搜尋
if i == 0, j == 0 {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return .max
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
let up = minPathSumDFS(grid: grid, i: i - 1, j: j)
let left = minPathSumDFS(grid: grid, i: i, j: j - 1)
// 返回從左上角到 (i, j) 的最小路徑代價
return min(left, up) + grid[i][j]
}
/* 最小路徑和:暴力搜尋 */
function minPathSumDFS(grid, i, j) {
// 若為左上角單元格,則終止搜尋
if (i === 0 && j === 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Infinity;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
const up = minPathSumDFS(grid, i - 1, j);
const left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return Math.min(left, up) + grid[i][j];
}
/* 最小路徑和:暴力搜尋 */
function minPathSumDFS(
grid: Array<Array<number>>,
i: number,
j: number
): number {
// 若為左上角單元格,則終止搜尋
if (i === 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Infinity;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
const up = minPathSumDFS(grid, i - 1, j);
const left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return Math.min(left, up) + grid[i][j];
}
/* 最小路徑和:暴力搜尋 */
int minPathSumDFS(List<List<int>> grid, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
// 在 Dart 中,int 型別是固定範圍的整數,不存在表示“無窮大”的值
return BigInt.from(2).pow(31).toInt();
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
int up = minPathSumDFS(grid, i - 1, j);
int left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return min(left, up) + grid[i][j];
}
/* 最小路徑和:暴力搜尋 */
fn min_path_sum_dfs(grid: &Vec<Vec<i32>>, i: i32, j: i32) -> i32 {
// 若為左上角單元格,則終止搜尋
if i == 0 && j == 0 {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return i32::MAX;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
let up = min_path_sum_dfs(grid, i - 1, j);
let left = min_path_sum_dfs(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
std::cmp::min(left, up) + grid[i as usize][j as usize]
}
/* 最小路徑和:暴力搜尋 */
int minPathSumDFS(int grid[MAX_SIZE][MAX_SIZE], int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return INT_MAX;
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
int up = minPathSumDFS(grid, i - 1, j);
int left = minPathSumDFS(grid, i, j - 1);
// 返回從左上角到 (i, j) 的最小路徑代價
return myMin(left, up) != INT_MAX ? myMin(left, up) + grid[i][j] : INT_MAX;
}
/* 最小路徑和:暴力搜尋 */
fun minPathSumDFS(grid: Array<IntArray>, i: Int, j: Int): Int {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Int.MAX_VALUE
}
// 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
val up = minPathSumDFS(grid, i - 1, j)
val left = minPathSumDFS(grid, i, j - 1)
// 返回從左上角到 (i, j) 的最小路徑代價
return min(left, up) + grid[i][j]
}
### 最小路徑和:暴力搜尋 ###
def min_path_sum_dfs(grid, i, j)
# 若為左上角單元格,則終止搜尋
return grid[i][j] if i == 0 && j == 0
# 若行列索引越界,則返回 +∞ 代價
return Float::INFINITY if i < 0 || j < 0
# 計算從左上角到 (i-1, j) 和 (i, j-1) 的最小路徑代價
up = min_path_sum_dfs(grid, i - 1, j)
left = min_path_sum_dfs(grid, i, j - 1)
# 返回從左上角到 (i, j) 的最小路徑代價
[left, up].min + grid[i][j]
end
視覺化執行
圖 14-14 給出了以 \(dp[2, 1]\) 為根節點的遞迴樹,其中包含一些重疊子問題,其數量會隨著網格 grid 的尺寸變大而急劇增多。
從本質上看,造成重疊子問題的原因為:存在多條路徑可以從左上角到達某一單元格。
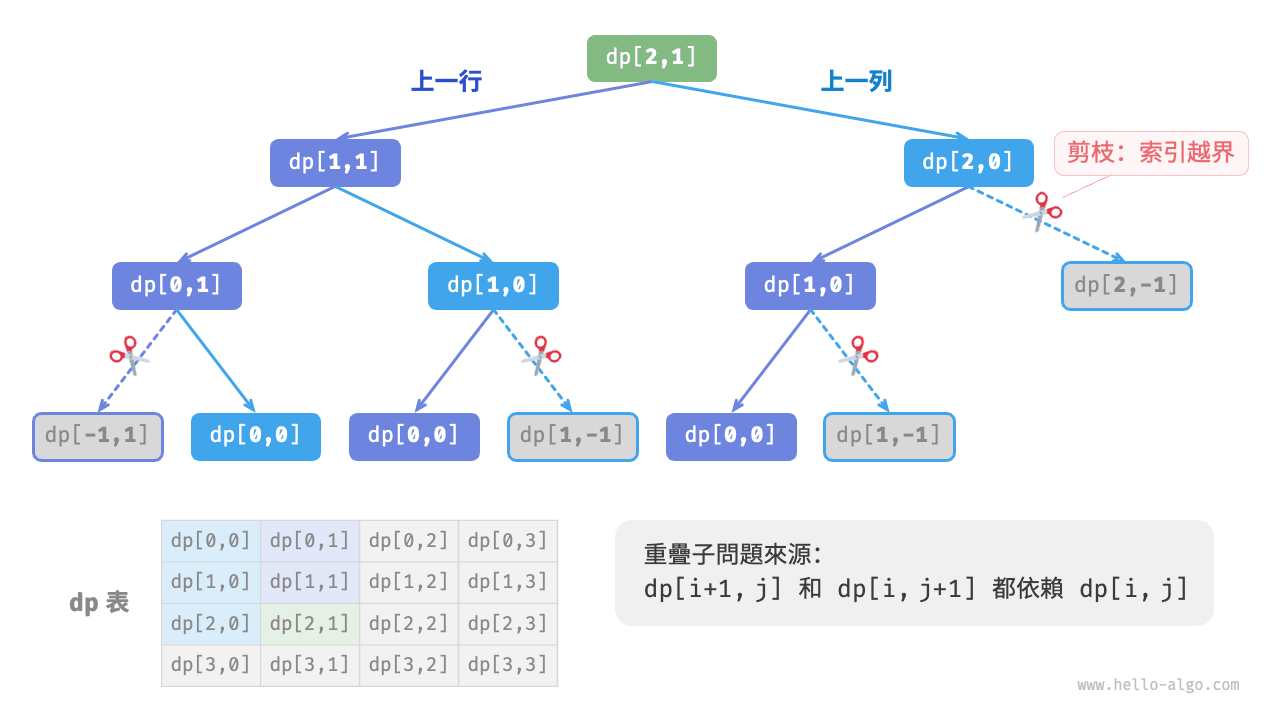
圖 14-14 暴力搜尋遞迴樹
每個狀態都有向下和向右兩種選擇,從左上角走到右下角總共需要 \(m + n - 2\) 步,所以最差時間複雜度為 \(O(2^{m + n})\) ,其中 \(n\) 和 \(m\) 分別為網格的行數和列數。請注意,這種計算方式未考慮臨近網格邊界的情況,當到達網格邊界時只剩下一種選擇,因此實際的路徑數量會少一些。
2. 方法二:記憶化搜尋¶
我們引入一個和網格 grid 相同尺寸的記憶串列 mem ,用於記錄各個子問題的解,並將重疊子問題進行剪枝:
def min_path_sum_dfs_mem(
grid: list[list[int]], mem: list[list[int]], i: int, j: int
) -> int:
"""最小路徑和:記憶化搜尋"""
# 若為左上角單元格,則終止搜尋
if i == 0 and j == 0:
return grid[0][0]
# 若行列索引越界,則返回 +∞ 代價
if i < 0 or j < 0:
return inf
# 若已有記錄,則直接返回
if mem[i][j] != -1:
return mem[i][j]
# 左邊和上邊單元格的最小路徑代價
up = min_path_sum_dfs_mem(grid, mem, i - 1, j)
left = min_path_sum_dfs_mem(grid, mem, i, j - 1)
# 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = min(left, up) + grid[i][j]
return mem[i][j]
/* 最小路徑和:記憶化搜尋 */
int minPathSumDFSMem(vector<vector<int>> &grid, vector<vector<int>> &mem, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return INT_MAX;
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
int up = minPathSumDFSMem(grid, mem, i - 1, j);
int left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = min(left, up) != INT_MAX ? min(left, up) + grid[i][j] : INT_MAX;
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
int minPathSumDFSMem(int[][] grid, int[][] mem, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Integer.MAX_VALUE;
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
int up = minPathSumDFSMem(grid, mem, i - 1, j);
int left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = Math.min(left, up) + grid[i][j];
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
int MinPathSumDFSMem(int[][] grid, int[][] mem, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return int.MaxValue;
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
int up = MinPathSumDFSMem(grid, mem, i - 1, j);
int left = MinPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = Math.Min(left, up) + grid[i][j];
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
func minPathSumDFSMem(grid, mem [][]int, i, j int) int {
// 若為左上角單元格,則終止搜尋
if i == 0 && j == 0 {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return math.MaxInt
}
// 若已有記錄,則直接返回
if mem[i][j] != -1 {
return mem[i][j]
}
// 左邊和上邊單元格的最小路徑代價
up := minPathSumDFSMem(grid, mem, i-1, j)
left := minPathSumDFSMem(grid, mem, i, j-1)
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = int(math.Min(float64(left), float64(up))) + grid[i][j]
return mem[i][j]
}
/* 最小路徑和:記憶化搜尋 */
func minPathSumDFSMem(grid: [[Int]], mem: inout [[Int]], i: Int, j: Int) -> Int {
// 若為左上角單元格,則終止搜尋
if i == 0, j == 0 {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return .max
}
// 若已有記錄,則直接返回
if mem[i][j] != -1 {
return mem[i][j]
}
// 左邊和上邊單元格的最小路徑代價
let up = minPathSumDFSMem(grid: grid, mem: &mem, i: i - 1, j: j)
let left = minPathSumDFSMem(grid: grid, mem: &mem, i: i, j: j - 1)
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = min(left, up) + grid[i][j]
return mem[i][j]
}
/* 最小路徑和:記憶化搜尋 */
function minPathSumDFSMem(grid, mem, i, j) {
// 若為左上角單元格,則終止搜尋
if (i === 0 && j === 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Infinity;
}
// 若已有記錄,則直接返回
if (mem[i][j] !== -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
const up = minPathSumDFSMem(grid, mem, i - 1, j);
const left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = Math.min(left, up) + grid[i][j];
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
function minPathSumDFSMem(
grid: Array<Array<number>>,
mem: Array<Array<number>>,
i: number,
j: number
): number {
// 若為左上角單元格,則終止搜尋
if (i === 0 && j === 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Infinity;
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
const up = minPathSumDFSMem(grid, mem, i - 1, j);
const left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = Math.min(left, up) + grid[i][j];
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
int minPathSumDFSMem(List<List<int>> grid, List<List<int>> mem, int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
// 在 Dart 中,int 型別是固定範圍的整數,不存在表示“無窮大”的值
return BigInt.from(2).pow(31).toInt();
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
int up = minPathSumDFSMem(grid, mem, i - 1, j);
int left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = min(left, up) + grid[i][j];
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
fn min_path_sum_dfs_mem(grid: &Vec<Vec<i32>>, mem: &mut Vec<Vec<i32>>, i: i32, j: i32) -> i32 {
// 若為左上角單元格,則終止搜尋
if i == 0 && j == 0 {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if i < 0 || j < 0 {
return i32::MAX;
}
// 若已有記錄,則直接返回
if mem[i as usize][j as usize] != -1 {
return mem[i as usize][j as usize];
}
// 左邊和上邊單元格的最小路徑代價
let up = min_path_sum_dfs_mem(grid, mem, i - 1, j);
let left = min_path_sum_dfs_mem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i as usize][j as usize] = std::cmp::min(left, up) + grid[i as usize][j as usize];
mem[i as usize][j as usize]
}
/* 最小路徑和:記憶化搜尋 */
int minPathSumDFSMem(int grid[MAX_SIZE][MAX_SIZE], int mem[MAX_SIZE][MAX_SIZE], int i, int j) {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0];
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return INT_MAX;
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j];
}
// 左邊和上邊單元格的最小路徑代價
int up = minPathSumDFSMem(grid, mem, i - 1, j);
int left = minPathSumDFSMem(grid, mem, i, j - 1);
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = myMin(left, up) != INT_MAX ? myMin(left, up) + grid[i][j] : INT_MAX;
return mem[i][j];
}
/* 最小路徑和:記憶化搜尋 */
fun minPathSumDFSMem(
grid: Array<IntArray>,
mem: Array<IntArray>,
i: Int,
j: Int
): Int {
// 若為左上角單元格,則終止搜尋
if (i == 0 && j == 0) {
return grid[0][0]
}
// 若行列索引越界,則返回 +∞ 代價
if (i < 0 || j < 0) {
return Int.MAX_VALUE
}
// 若已有記錄,則直接返回
if (mem[i][j] != -1) {
return mem[i][j]
}
// 左邊和上邊單元格的最小路徑代價
val up = minPathSumDFSMem(grid, mem, i - 1, j)
val left = minPathSumDFSMem(grid, mem, i, j - 1)
// 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = min(left, up) + grid[i][j]
return mem[i][j]
}
### 最小路徑和:記憶化搜尋 ###
def min_path_sum_dfs_mem(grid, mem, i, j)
# 若為左上角單元格,則終止搜尋
return grid[0][0] if i == 0 && j == 0
# 若行列索引越界,則返回 +∞ 代價
return Float::INFINITY if i < 0 || j < 0
# 若已有記錄,則直接返回
return mem[i][j] if mem[i][j] != -1
# 左邊和上邊單元格的最小路徑代價
up = min_path_sum_dfs_mem(grid, mem, i - 1, j)
left = min_path_sum_dfs_mem(grid, mem, i, j - 1)
# 記錄並返回左上角到 (i, j) 的最小路徑代價
mem[i][j] = [left, up].min + grid[i][j]
end
視覺化執行
如圖 14-15 所示,在引入記憶化後,所有子問題的解只需計算一次,因此時間複雜度取決於狀態總數,即網格尺寸 \(O(nm)\) 。
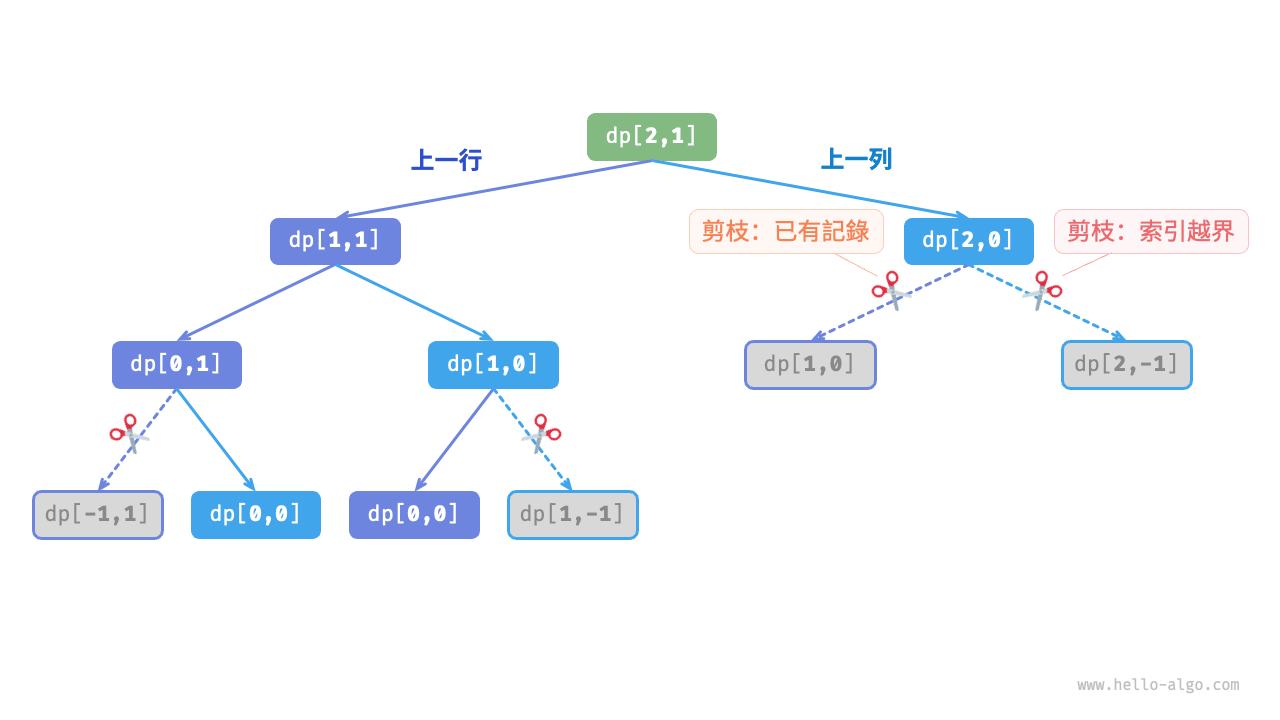
圖 14-15 記憶化搜尋遞迴樹
3. 方法三:動態規劃¶
基於迭代實現動態規劃解法,程式碼如下所示:
def min_path_sum_dp(grid: list[list[int]]) -> int:
"""最小路徑和:動態規劃"""
n, m = len(grid), len(grid[0])
# 初始化 dp 表
dp = [[0] * m for _ in range(n)]
dp[0][0] = grid[0][0]
# 狀態轉移:首行
for j in range(1, m):
dp[0][j] = dp[0][j - 1] + grid[0][j]
# 狀態轉移:首列
for i in range(1, n):
dp[i][0] = dp[i - 1][0] + grid[i][0]
# 狀態轉移:其餘行和列
for i in range(1, n):
for j in range(1, m):
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j]
return dp[n - 1][m - 1]
/* 最小路徑和:動態規劃 */
int minPathSumDP(vector<vector<int>> &grid) {
int n = grid.size(), m = grid[0].size();
// 初始化 dp 表
vector<vector<int>> dp(n, vector<int>(m));
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (int i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
/* 最小路徑和:動態規劃 */
int minPathSumDP(int[][] grid) {
int n = grid.length, m = grid[0].length;
// 初始化 dp 表
int[][] dp = new int[n][m];
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (int i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i][j] = Math.min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
/* 最小路徑和:動態規劃 */
int MinPathSumDP(int[][] grid) {
int n = grid.Length, m = grid[0].Length;
// 初始化 dp 表
int[,] dp = new int[n, m];
dp[0, 0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[0, j] = dp[0, j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (int i = 1; i < n; i++) {
dp[i, 0] = dp[i - 1, 0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i, j] = Math.Min(dp[i, j - 1], dp[i - 1, j]) + grid[i][j];
}
}
return dp[n - 1, m - 1];
}
/* 最小路徑和:動態規劃 */
func minPathSumDP(grid [][]int) int {
n, m := len(grid), len(grid[0])
// 初始化 dp 表
dp := make([][]int, n)
for i := 0; i < n; i++ {
dp[i] = make([]int, m)
}
dp[0][0] = grid[0][0]
// 狀態轉移:首行
for j := 1; j < m; j++ {
dp[0][j] = dp[0][j-1] + grid[0][j]
}
// 狀態轉移:首列
for i := 1; i < n; i++ {
dp[i][0] = dp[i-1][0] + grid[i][0]
}
// 狀態轉移:其餘行和列
for i := 1; i < n; i++ {
for j := 1; j < m; j++ {
dp[i][j] = int(math.Min(float64(dp[i][j-1]), float64(dp[i-1][j]))) + grid[i][j]
}
}
return dp[n-1][m-1]
}
/* 最小路徑和:動態規劃 */
func minPathSumDP(grid: [[Int]]) -> Int {
let n = grid.count
let m = grid[0].count
// 初始化 dp 表
var dp = Array(repeating: Array(repeating: 0, count: m), count: n)
dp[0][0] = grid[0][0]
// 狀態轉移:首行
for j in 1 ..< m {
dp[0][j] = dp[0][j - 1] + grid[0][j]
}
// 狀態轉移:首列
for i in 1 ..< n {
dp[i][0] = dp[i - 1][0] + grid[i][0]
}
// 狀態轉移:其餘行和列
for i in 1 ..< n {
for j in 1 ..< m {
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j]
}
}
return dp[n - 1][m - 1]
}
/* 最小路徑和:動態規劃 */
function minPathSumDP(grid) {
const n = grid.length,
m = grid[0].length;
// 初始化 dp 表
const dp = Array.from({ length: n }, () =>
Array.from({ length: m }, () => 0)
);
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (let j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (let i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (let i = 1; i < n; i++) {
for (let j = 1; j < m; j++) {
dp[i][j] = Math.min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
/* 最小路徑和:動態規劃 */
function minPathSumDP(grid: Array<Array<number>>): number {
const n = grid.length,
m = grid[0].length;
// 初始化 dp 表
const dp = Array.from({ length: n }, () =>
Array.from({ length: m }, () => 0)
);
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (let j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (let i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (let i = 1; i < n; i++) {
for (let j: number = 1; j < m; j++) {
dp[i][j] = Math.min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
/* 最小路徑和:動態規劃 */
int minPathSumDP(List<List<int>> grid) {
int n = grid.length, m = grid[0].length;
// 初始化 dp 表
List<List<int>> dp = List.generate(n, (i) => List.filled(m, 0));
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (int i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
return dp[n - 1][m - 1];
}
/* 最小路徑和:動態規劃 */
fn min_path_sum_dp(grid: &Vec<Vec<i32>>) -> i32 {
let (n, m) = (grid.len(), grid[0].len());
// 初始化 dp 表
let mut dp = vec![vec![0; m]; n];
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for j in 1..m {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for i in 1..n {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for i in 1..n {
for j in 1..m {
dp[i][j] = std::cmp::min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
dp[n - 1][m - 1]
}
/* 最小路徑和:動態規劃 */
int minPathSumDP(int grid[MAX_SIZE][MAX_SIZE], int n, int m) {
// 初始化 dp 表
int **dp = malloc(n * sizeof(int *));
for (int i = 0; i < n; i++) {
dp[i] = calloc(m, sizeof(int));
}
dp[0][0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[0][j] = dp[0][j - 1] + grid[0][j];
}
// 狀態轉移:首列
for (int i = 1; i < n; i++) {
dp[i][0] = dp[i - 1][0] + grid[i][0];
}
// 狀態轉移:其餘行和列
for (int i = 1; i < n; i++) {
for (int j = 1; j < m; j++) {
dp[i][j] = myMin(dp[i][j - 1], dp[i - 1][j]) + grid[i][j];
}
}
int res = dp[n - 1][m - 1];
// 釋放記憶體
for (int i = 0; i < n; i++) {
free(dp[i]);
}
return res;
}
/* 最小路徑和:動態規劃 */
fun minPathSumDP(grid: Array<IntArray>): Int {
val n = grid.size
val m = grid[0].size
// 初始化 dp 表
val dp = Array(n) { IntArray(m) }
dp[0][0] = grid[0][0]
// 狀態轉移:首行
for (j in 1..<m) {
dp[0][j] = dp[0][j - 1] + grid[0][j]
}
// 狀態轉移:首列
for (i in 1..<n) {
dp[i][0] = dp[i - 1][0] + grid[i][0]
}
// 狀態轉移:其餘行和列
for (i in 1..<n) {
for (j in 1..<m) {
dp[i][j] = min(dp[i][j - 1], dp[i - 1][j]) + grid[i][j]
}
}
return dp[n - 1][m - 1]
}
### 最小路徑和:動態規劃 ###
def min_path_sum_dp(grid)
n, m = grid.length, grid.first.length
# 初始化 dp 表
dp = Array.new(n) { Array.new(m, 0) }
dp[0][0] = grid[0][0]
# 狀態轉移:首行
(1...m).each { |j| dp[0][j] = dp[0][j - 1] + grid[0][j] }
# 狀態轉移:首列
(1...n).each { |i| dp[i][0] = dp[i - 1][0] + grid[i][0] }
# 狀態轉移:其餘行和列
for i in 1...n
for j in 1...m
dp[i][j] = [dp[i][j - 1], dp[i - 1][j]].min + grid[i][j]
end
end
dp[n -1][m -1]
end
視覺化執行
圖 14-16 展示了最小路徑和的狀態轉移過程,其走訪了整個網格,因此時間複雜度為 \(O(nm)\) 。
陣列 dp 大小為 \(n \times m\) ,因此空間複雜度為 \(O(nm)\) 。
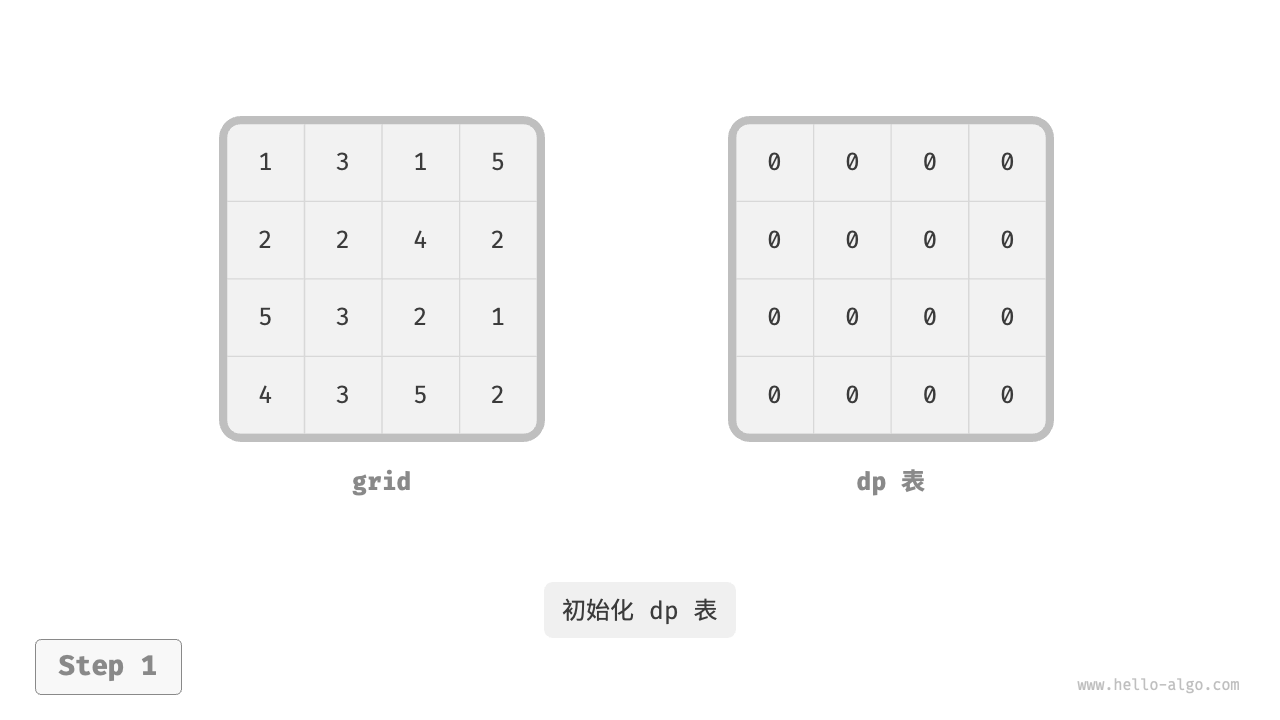

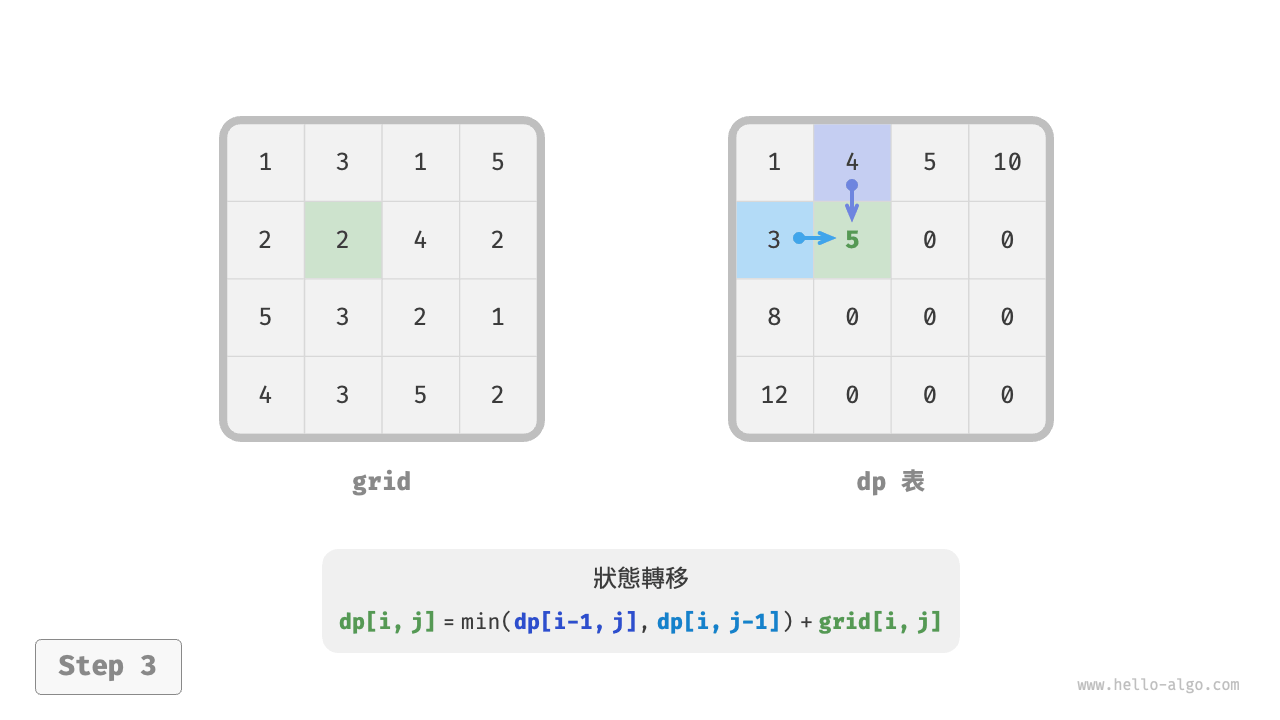
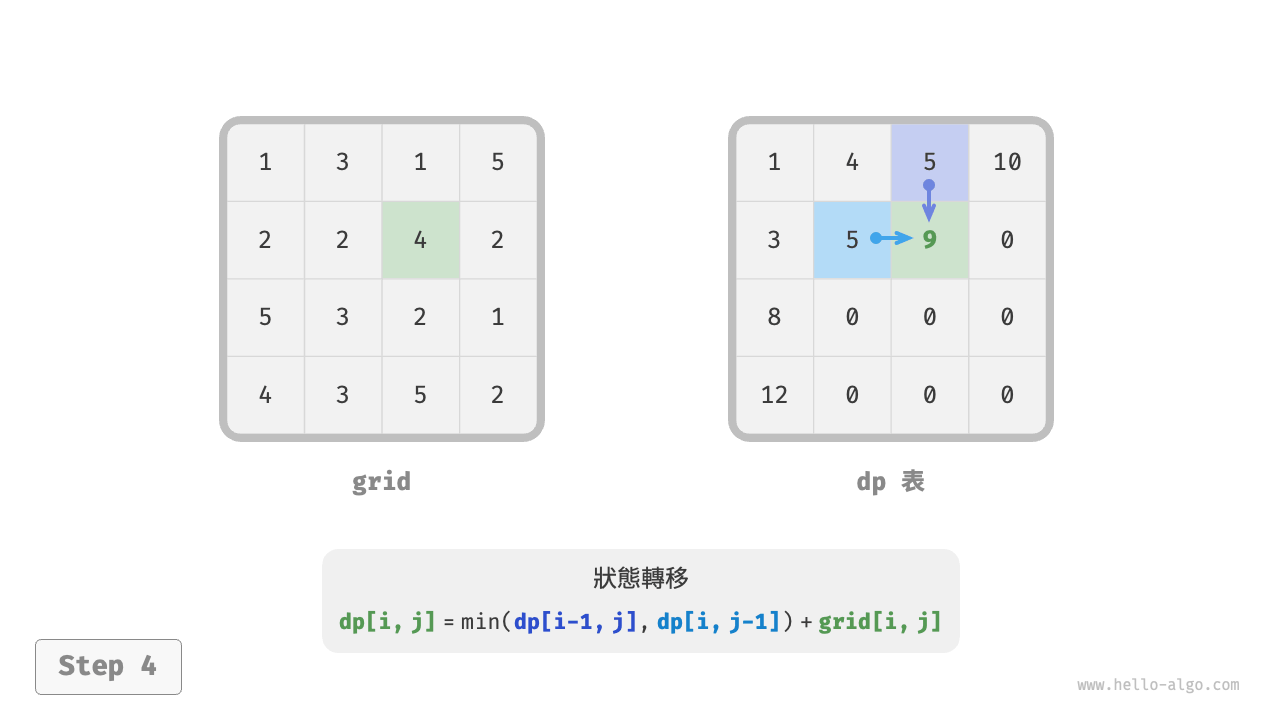
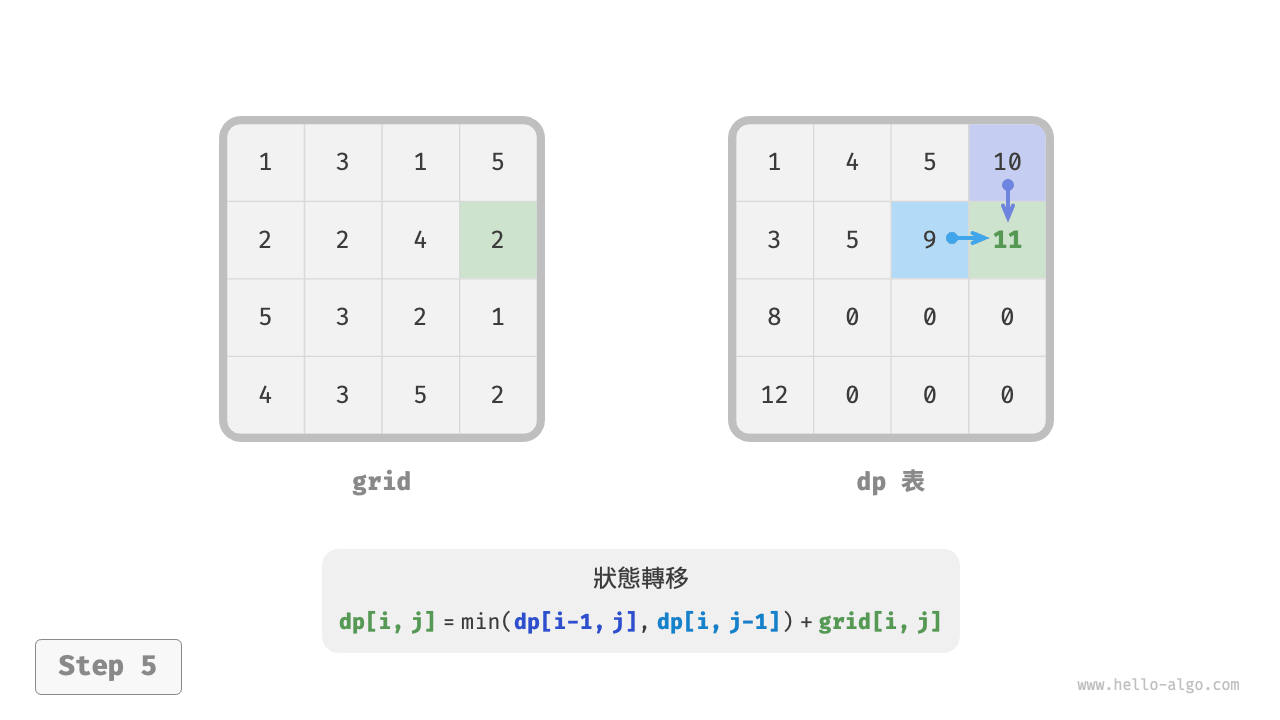
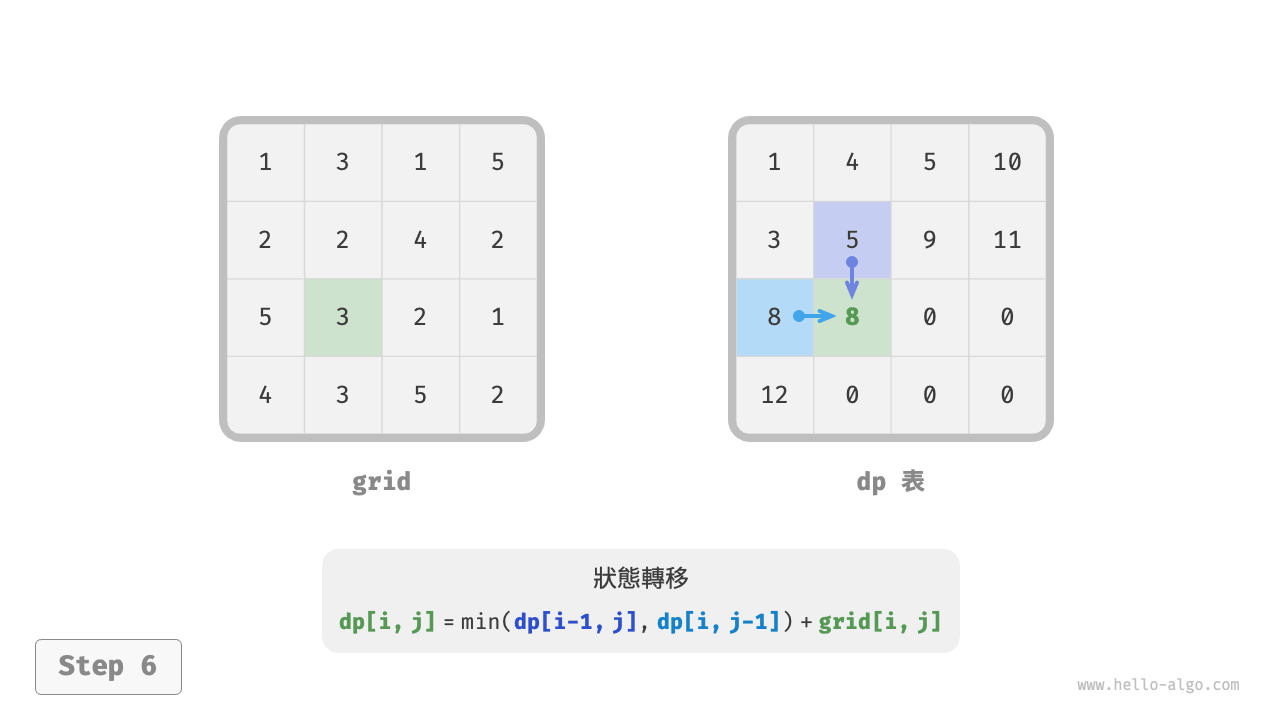
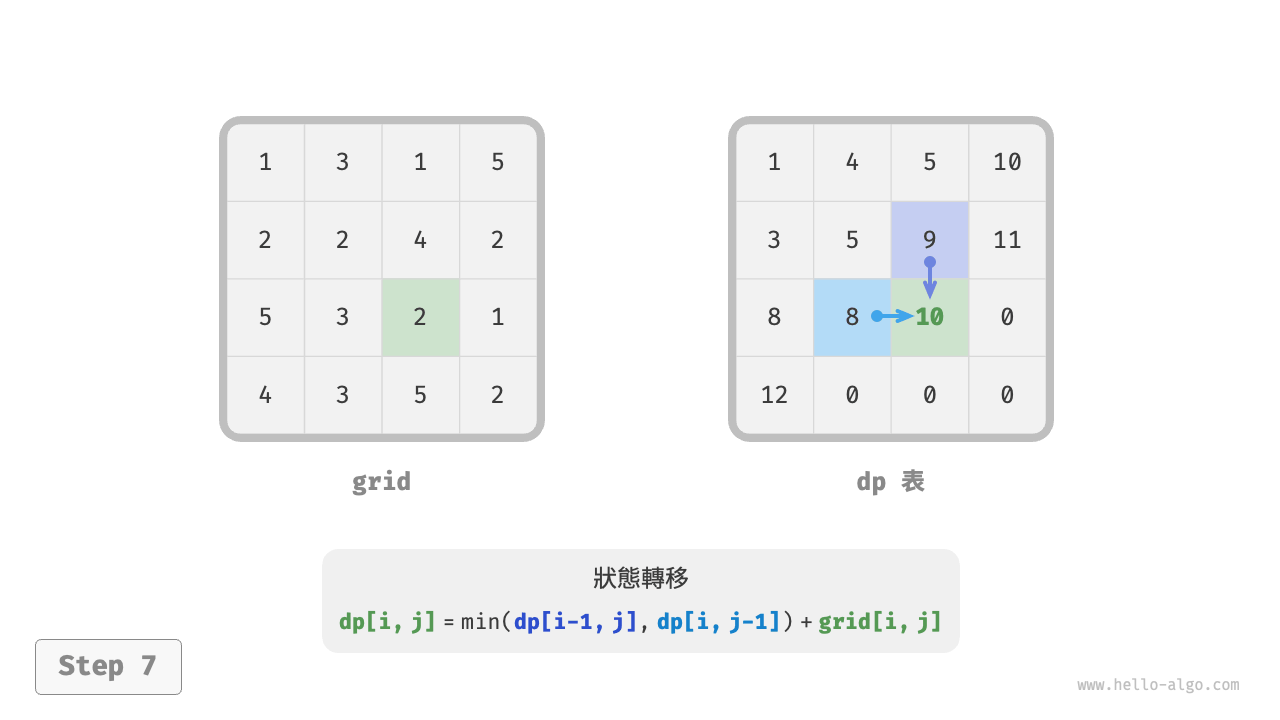
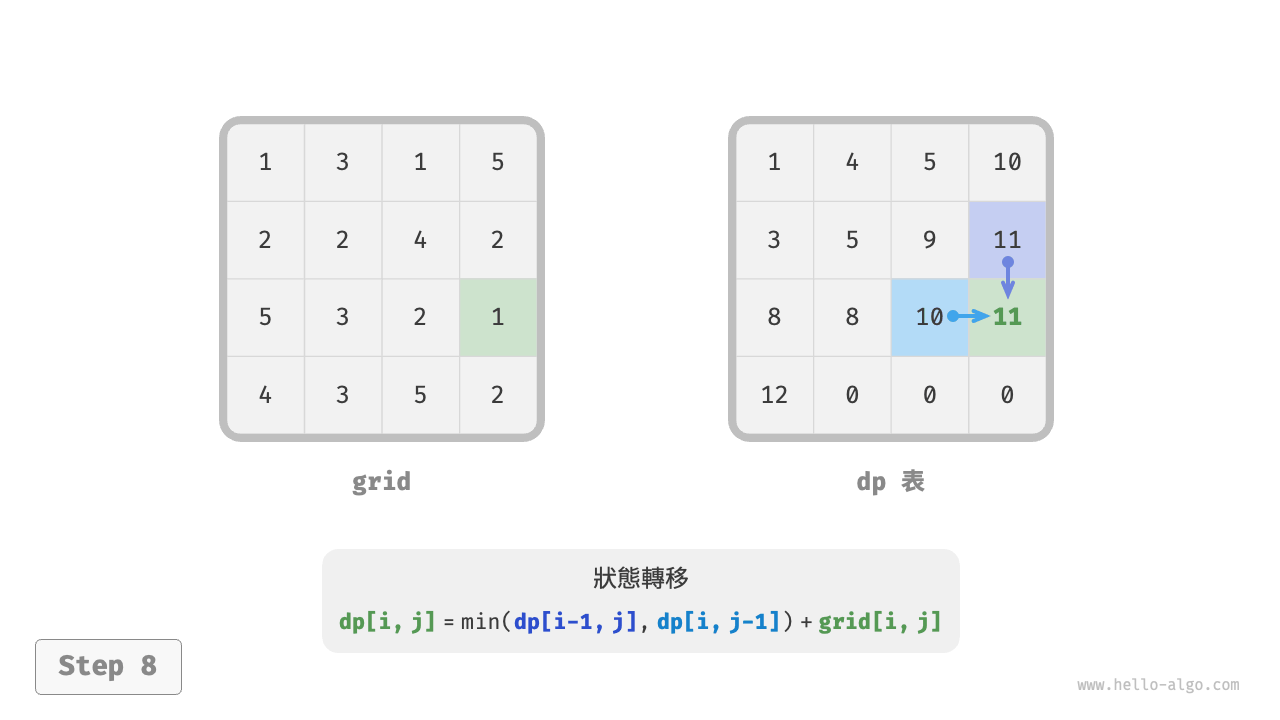
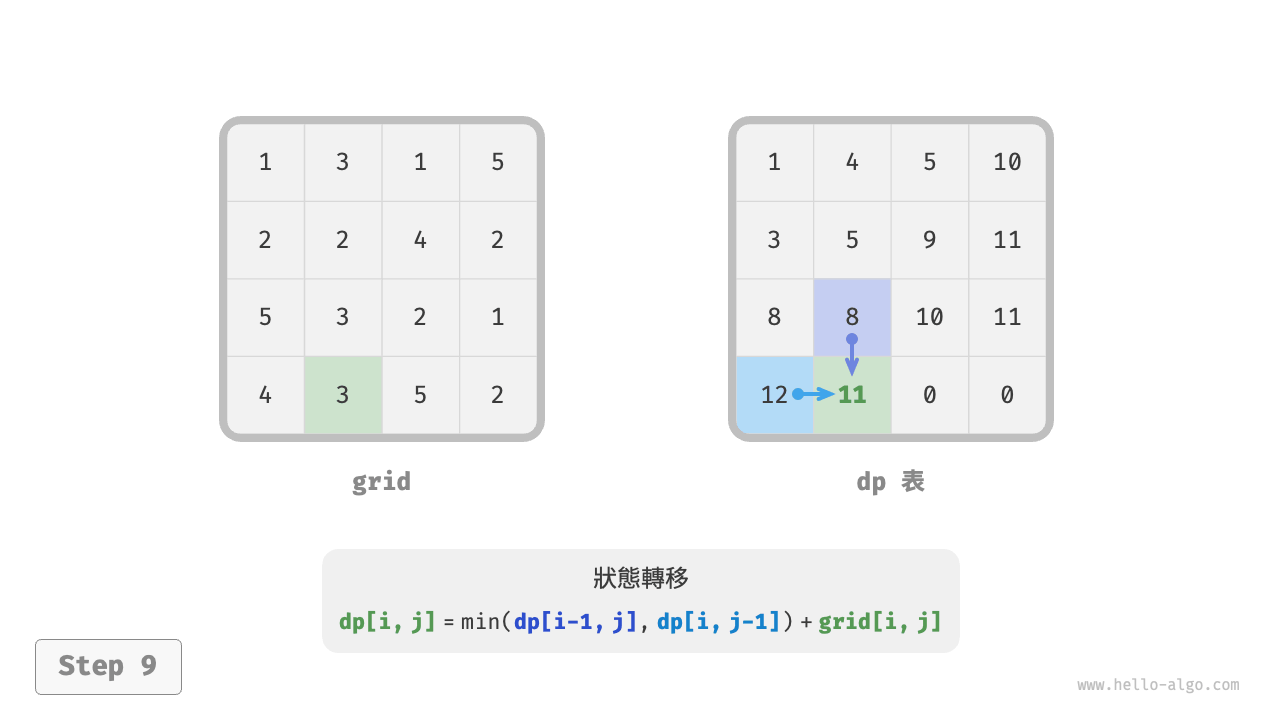
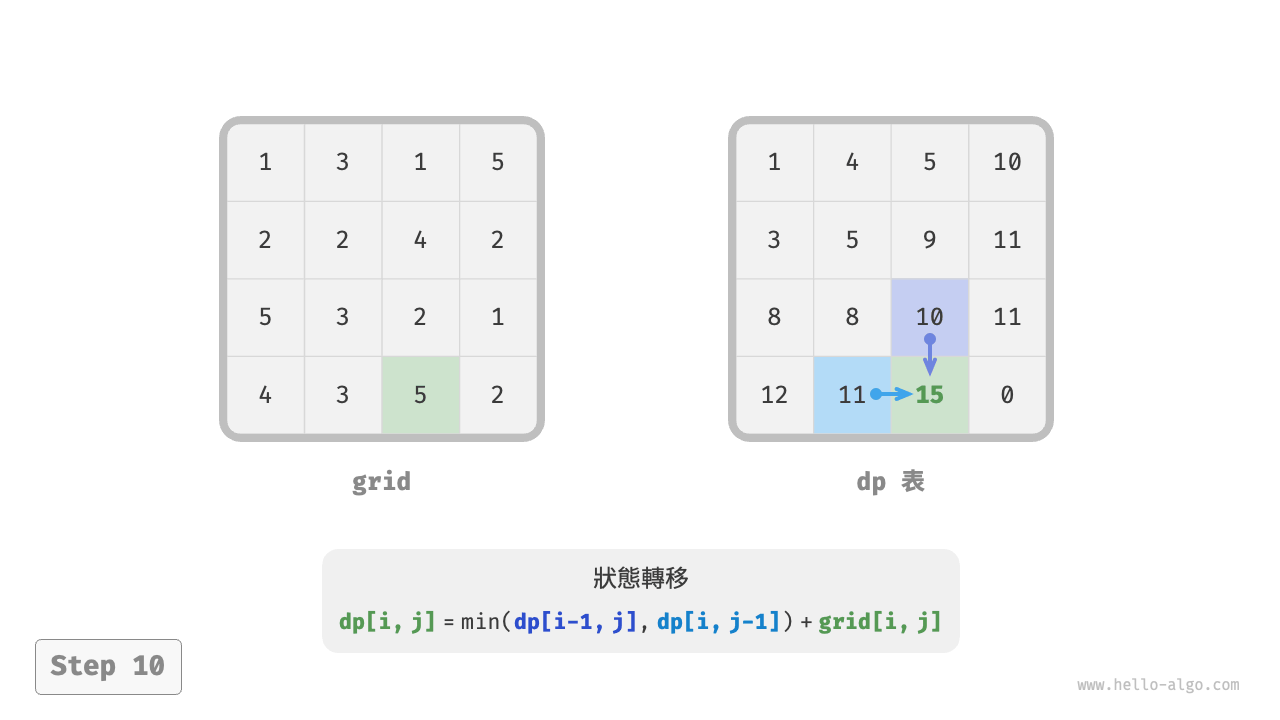
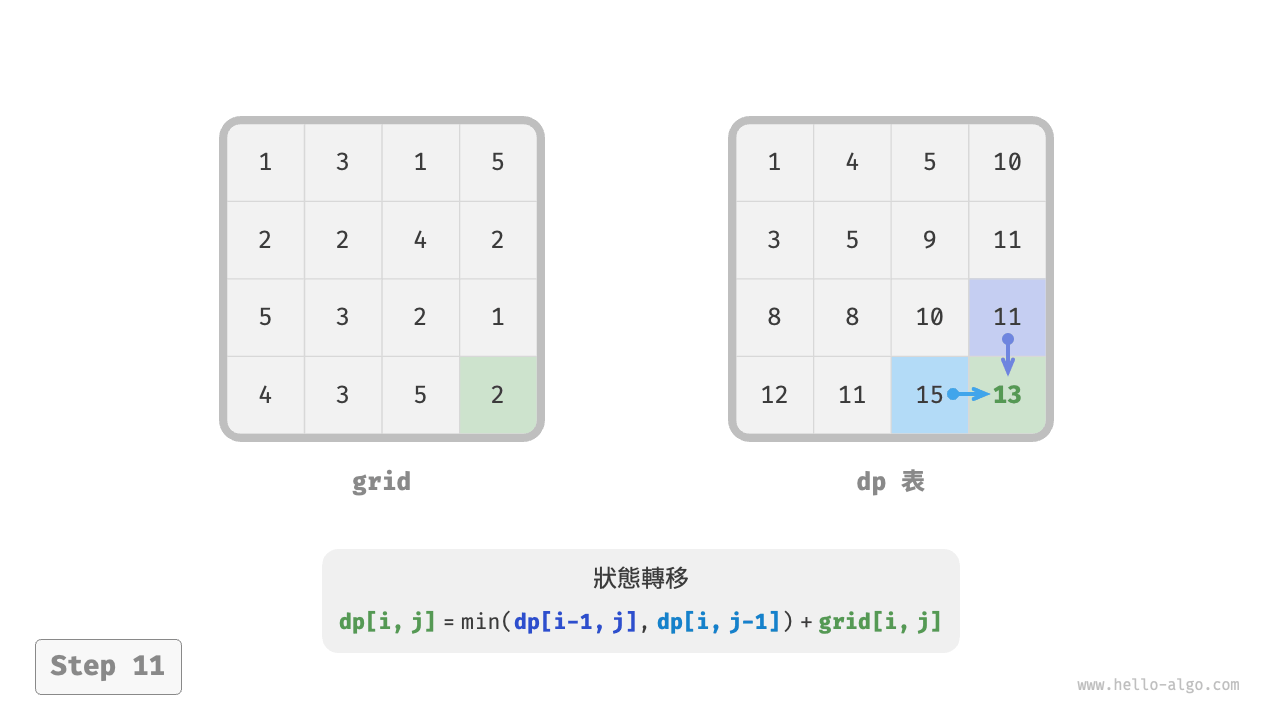

圖 14-16 最小路徑和的動態規劃過程
4. 空間最佳化¶
由於每個格子只與其左邊和上邊的格子有關,因此我們可以只用一個單行陣列來實現 \(dp\) 表。
請注意,因為陣列 dp 只能表示一行的狀態,所以我們無法提前初始化首列狀態,而是在走訪每行時更新它:
def min_path_sum_dp_comp(grid: list[list[int]]) -> int:
"""最小路徑和:空間最佳化後的動態規劃"""
n, m = len(grid), len(grid[0])
# 初始化 dp 表
dp = [0] * m
# 狀態轉移:首行
dp[0] = grid[0][0]
for j in range(1, m):
dp[j] = dp[j - 1] + grid[0][j]
# 狀態轉移:其餘行
for i in range(1, n):
# 狀態轉移:首列
dp[0] = dp[0] + grid[i][0]
# 狀態轉移:其餘列
for j in range(1, m):
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j]
return dp[m - 1]
/* 最小路徑和:空間最佳化後的動態規劃 */
int minPathSumDPComp(vector<vector<int>> &grid) {
int n = grid.size(), m = grid[0].size();
// 初始化 dp 表
vector<int> dp(m);
// 狀態轉移:首行
dp[0] = grid[0][0];
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (int i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (int j = 1; j < m; j++) {
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
int minPathSumDPComp(int[][] grid) {
int n = grid.length, m = grid[0].length;
// 初始化 dp 表
int[] dp = new int[m];
// 狀態轉移:首行
dp[0] = grid[0][0];
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (int i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (int j = 1; j < m; j++) {
dp[j] = Math.min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
int MinPathSumDPComp(int[][] grid) {
int n = grid.Length, m = grid[0].Length;
// 初始化 dp 表
int[] dp = new int[m];
dp[0] = grid[0][0];
// 狀態轉移:首行
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (int i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (int j = 1; j < m; j++) {
dp[j] = Math.Min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
func minPathSumDPComp(grid [][]int) int {
n, m := len(grid), len(grid[0])
// 初始化 dp 表
dp := make([]int, m)
// 狀態轉移:首行
dp[0] = grid[0][0]
for j := 1; j < m; j++ {
dp[j] = dp[j-1] + grid[0][j]
}
// 狀態轉移:其餘行和列
for i := 1; i < n; i++ {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0]
// 狀態轉移:其餘列
for j := 1; j < m; j++ {
dp[j] = int(math.Min(float64(dp[j-1]), float64(dp[j]))) + grid[i][j]
}
}
return dp[m-1]
}
/* 最小路徑和:空間最佳化後的動態規劃 */
func minPathSumDPComp(grid: [[Int]]) -> Int {
let n = grid.count
let m = grid[0].count
// 初始化 dp 表
var dp = Array(repeating: 0, count: m)
// 狀態轉移:首行
dp[0] = grid[0][0]
for j in 1 ..< m {
dp[j] = dp[j - 1] + grid[0][j]
}
// 狀態轉移:其餘行
for i in 1 ..< n {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0]
// 狀態轉移:其餘列
for j in 1 ..< m {
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j]
}
}
return dp[m - 1]
}
/* 最小路徑和:空間最佳化後的動態規劃 */
function minPathSumDPComp(grid) {
const n = grid.length,
m = grid[0].length;
// 初始化 dp 表
const dp = new Array(m);
// 狀態轉移:首行
dp[0] = grid[0][0];
for (let j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (let i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (let j = 1; j < m; j++) {
dp[j] = Math.min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
function minPathSumDPComp(grid: Array<Array<number>>): number {
const n = grid.length,
m = grid[0].length;
// 初始化 dp 表
const dp = new Array(m);
// 狀態轉移:首行
dp[0] = grid[0][0];
for (let j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (let i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (let j = 1; j < m; j++) {
dp[j] = Math.min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
int minPathSumDPComp(List<List<int>> grid) {
int n = grid.length, m = grid[0].length;
// 初始化 dp 表
List<int> dp = List.filled(m, 0);
dp[0] = grid[0][0];
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (int i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (int j = 1; j < m; j++) {
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j];
}
}
return dp[m - 1];
}
/* 最小路徑和:空間最佳化後的動態規劃 */
fn min_path_sum_dp_comp(grid: &Vec<Vec<i32>>) -> i32 {
let (n, m) = (grid.len(), grid[0].len());
// 初始化 dp 表
let mut dp = vec![0; m];
// 狀態轉移:首行
dp[0] = grid[0][0];
for j in 1..m {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for i in 1..n {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for j in 1..m {
dp[j] = std::cmp::min(dp[j - 1], dp[j]) + grid[i][j];
}
}
dp[m - 1]
}
/* 最小路徑和:空間最佳化後的動態規劃 */
int minPathSumDPComp(int grid[MAX_SIZE][MAX_SIZE], int n, int m) {
// 初始化 dp 表
int *dp = calloc(m, sizeof(int));
// 狀態轉移:首行
dp[0] = grid[0][0];
for (int j = 1; j < m; j++) {
dp[j] = dp[j - 1] + grid[0][j];
}
// 狀態轉移:其餘行
for (int i = 1; i < n; i++) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0];
// 狀態轉移:其餘列
for (int j = 1; j < m; j++) {
dp[j] = myMin(dp[j - 1], dp[j]) + grid[i][j];
}
}
int res = dp[m - 1];
// 釋放記憶體
free(dp);
return res;
}
/* 最小路徑和:空間最佳化後的動態規劃 */
fun minPathSumDPComp(grid: Array<IntArray>): Int {
val n = grid.size
val m = grid[0].size
// 初始化 dp 表
val dp = IntArray(m)
// 狀態轉移:首行
dp[0] = grid[0][0]
for (j in 1..<m) {
dp[j] = dp[j - 1] + grid[0][j]
}
// 狀態轉移:其餘行
for (i in 1..<n) {
// 狀態轉移:首列
dp[0] = dp[0] + grid[i][0]
// 狀態轉移:其餘列
for (j in 1..<m) {
dp[j] = min(dp[j - 1], dp[j]) + grid[i][j]
}
}
return dp[m - 1]
}
### 最小路徑和:空間最佳化後的動態規劃 ###
def min_path_sum_dp_comp(grid)
n, m = grid.length, grid.first.length
# 初始化 dp 表
dp = Array.new(m, 0)
# 狀態轉移:首行
dp[0] = grid[0][0]
(1...m).each { |j| dp[j] = dp[j - 1] + grid[0][j] }
# 狀態轉移:其餘行
for i in 1...n
# 狀態轉移:首列
dp[0] = dp[0] + grid[i][0]
# 狀態轉移:其餘列
(1...m).each { |j| dp[j] = [dp[j - 1], dp[j]].min + grid[i][j] }
end
dp[m - 1]
end